 NA-MIC Project Weeks
NA-MIC Project Weeks
Back to Projects List
Endoscope Viewing Area Quantification
Key Investigators
- Franklin King (Brigham and Women’s Hospital)
Project Description
With experiments with bronchoscope continuum robots, we’ve found a need to visualize and quantify the amount (and possibly quality) of the viewing area provided by the camera. The idea is to retopologize a model created from CT data with equally sized polygons and then “paint” the polygons viewed using a virtual endoscope camera. The intention is that the movement of the virtual camera would be tied to the movement of a real bronchoscope/robot.
Objective
- Create module to “paint” viewed area and record metrics
Approach and Plan
- Use vtkHardwareSelector for the job - Testing done, works on basic level
- Convert into quantified metrics
- Optimization and stability
- Add ability to retopologize meshes within Slicer itself - vtk Subdivision filters
Progress and Next Steps
- Made and tried test Python script
- Script works but is still unstable and results in some unexpected behaviour and crashing
- Reimplementing as loadable module
- Narrowed down a bug (with some help from Andras) causing unexpected behaviour to an issue with QVTKOpenGLWidget and vtkHardware Selector: https://public.kitware.com/pipermail/vtkusers/2018-July/102288.html
- Made some progress reimplementing as a loadable module (temporarily using VTK7, QVTKWidget, and Slicer 4.8 in the meantime)
Illustrations
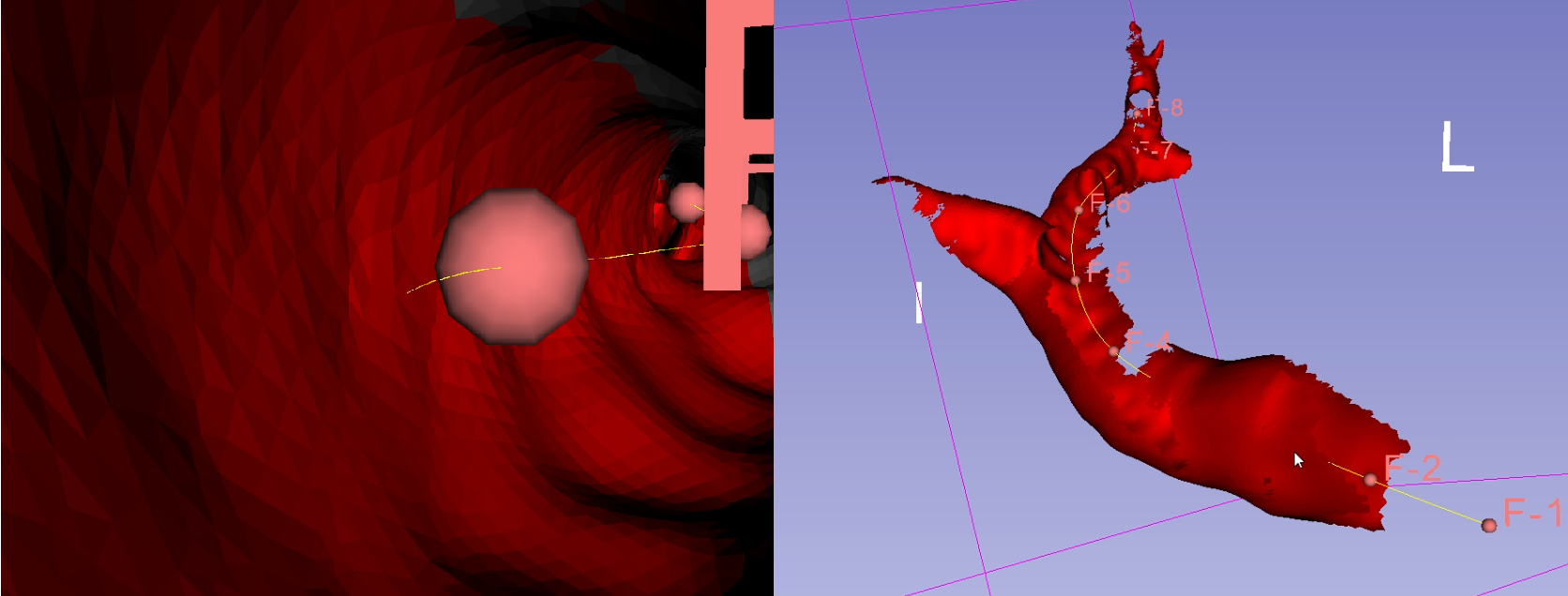 Video of results of test script using vtkHardwareSelector
Video of results of test script using vtkHardwareSelector
Background and References
- Source code: https://github.com/franklinwk/Slicer-EndoscopeViewingArea/